
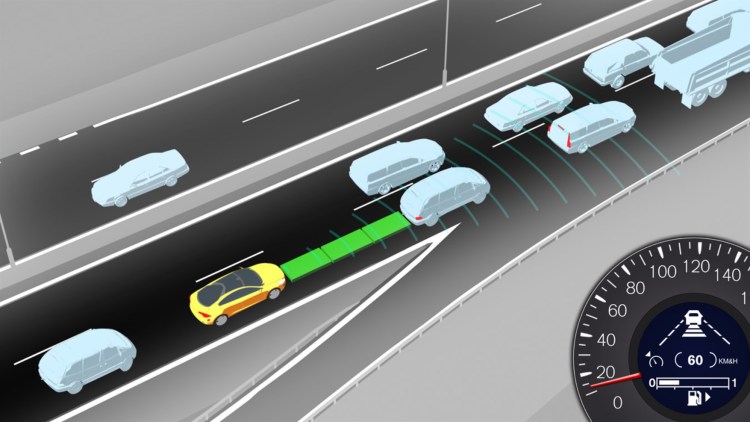
تتوفر أنظمة التحكم في السرعة في السيارات منذ سنوات عديدة. ومع ذلك ، يتم الآن تركيب نوع جديد من مثبت السرعة. يطلق عليه نظامAdaptive Cruise Control ويستخدم الرادار للحفاظ على مسافة آمنة من السيارة التي أمامك ، حتى لو تغيرت سرعة تلك السيارة. إنه ابتكار رائع يحسن السلامة ويقلل من التعب ويضيف الراحة. ولكن كيف يعمل؟
سيارات ذكية
شهد العقد الماضي إدخالاً واسع النطاق للأنظمة بدلاً من تعزيز ذكاء السيارة. يمنح نظام الفرامل المانعة للانغلاق (ABS) والتحكم الإلكتروني بالثبات (ESP) السيارة القدرة على التصرف بطرق لا يطلبها السائق تحديدًا – على سبيل المثال ، تحرير الفرامل للحظات لمنع انغلاق العجلة أو لتقليل فتح الخانق إذا السيارة تنزلق. يعد نظام التحكم التكيفي في السرعة خطوة أخرى على هذا الطريق لتحسين الذكاء.يعني وجود أنظمة مثل ABS و ESP أن العديد من إشارات الإدخال التي يحتاجها نظام تثبيت السرعة التكيفي متوفرة بالفعل. وتشمل سرعة السيارة ، التسارع الجانبي للمركبة ، إدخال مسرع السائق ، مدخلات توجيه السائق ، مدخلات فرامل السائق
خصائص مستشعر السيارة

يجب أن يفي المستشعر التطلعي لنظام تثبيت السرعة التكيفي ببعض متطلبات التصميم الصارمة.
1 – المدى
من أجل الحفاظ على مسافة تتبع مناسبة ، يجب أن يكون المستشعر قادرًا على العمل في نطاق معين. على سبيل المثال ، إذا تم تحديد المسافة التالية من حيث الفجوة الزمنية بين السيارتين ، فإن فجوة تبلغ ثانيتين عند 160 كم / ساعة تتطلب أن تكون المسافة بين السيارتين حوالي 90 مترًا. ومع ذلك ، من أجل أن يتمكن المستشعر من الحفاظ على التحكم المستمر ، فإن نطاق المستشعر الفعلي المطلوب سيكون حوالي 10 في المائة أكبر من هذا. لذلك إذا كانت السرعة القصوى المطلوبة لـ ACC هي 160 كم / ساعة ، فإن نطاق المستشعر الذي يبلغ حوالي 100 متر هو الحد الأدنى المطلوب
سرعة الإغلاق

يجب أن يكون المستشعر قادرًا على الكشف بسرعة عن إغلاق السيارة التي أمامك. إذا كان المستشعر بطيئًا في الاستجابة ، فستكون هناك حاجة إلى نطاق أكبر منه وإلا فإن السيارة التالية ستقترب كثيرًا قبل حدوث تقليل دواسة الوقود أو الكبح. سيؤثر حجم الكبح المسموح به أيضًا على هذا المطلب: إذا سُمح للسيارة بالفرملة بقوة ، فيمكن أن يكون المستشعر أبطأ في الاستجابة. بافتراض حد أقصى للتباطؤ التلقائي للفرملة يبلغ 0.2 جرام ، ومعدل إغلاق أقصى يبلغ 50-65 كم / ساعة ومسافة تتبع لا تقل عن 20-30 مترًا ، فإن نطاق المستشعر من 80 إلى 100 متر يعد أيضًا الحد الأدنى من المتطلبات.
مجال الرؤية

يقارن نظام رادار FMCW بين ترددات الإشارة المرسلة وصداها ، ومن خلال هذه التقنيات ، يمكن تحديد المسافة إلى الهدف وما إذا كان الهدف يقترب أو يتحرك بعيدًا. ومع ذلك ، هناك حاجة أيضًا إلى مزيد من البيانات – هل الهدف موجود مباشرة أمام الهدف الأمامي أم على جانب واحد منه؟ إذا كانت الخصائص الانعكاسية لرادار الهدف معروفة ، فإن اتساع صدى الإشارة يعتمد على الزاوية التي يستقبل بها الرادار الإشارة. ومع ذلك ، عندما تكون الخصائص العاكسة للهدف غير معروفة ، يجب اتباع نهج مختلف. لتحديد الزاوية التي يكتشف فيها الرادار شيئًا ما ، يتم إرسال وتحليل ثلاثة فصوص رادار. توفر نسبة اتساع الإشارة للفصوص الثلاثة المختلفة هذه المعلومات الزاوية.

استخدم رادار Denso المستخدم في طرازيتويوتا / لكزس نوعًا أكثر تقليدية من الرادار. يتم الكشف عن المسافة عن طريق قياس الوقت بين الإرسال والاستقبال. يتم الكشف عن الموضع الزاوي من خلال اختلافات الطور للإشارات المستقبلة بواسطة هوائيات متعددة. تختلف وحدة Denso أيضًا عن تصميم Bosch من حيث أنها تحتوي على هوائيات استقبال وإرسال منفصلة (على الرغم من تركيب جميع الهوائيات في مجموعة واحدة).
نظام بوش
من الجيد جدًا اكتشاف وجود سيارات في المقدمة ، ولكن كيف يتم تحديد ما إذا كانت السيارة في مسارك أم غير ذلك؟ ماذا يحدث عند المنعطفات؟ وماذا يحدث عندما تقطع سيارة مسارك؟ في نظام بوش FMCW ، يتم الكشف الإيجابي عن الأشياء من خلال مقارنة دورات تعديل الرادار المتتالية. إذا تم العثور على الجسم في الدورة الثانية حيث يمكن توقع وضعه على أساس السرعة والموقع الذي تم اكتشافه مسبقًا ، فمن المفترض أن يكون هو نفس السيارة
يحدث اختيار الكائن بهذه الطريقة:
1 – يتم حساب الموضع الجانبي للجسم مقابل المسار المتوقع للسيارة الخاصة بنظام ACC.
2 – يتم حساب “احتمالية الممر” للكائن ، أي الحارة التي من المرجح أن يكون الكائن فيها.
3 – يعتبر احتمال حارة أحد المدخلات الرئيسية في الخطوة التالية ، وهي “سمة المعقولية“. إلى جانب تواتر وموثوقية اكتشاف الأشياء ، يحدد هذا درجة معقولية أن السيارة المكتشفة في نفس حارة سيارة ACC.
4 – يتم تحديد الكائن كهدف فقط إذا كانت درجة المعقولية كافية. يعتمد هذا المعقول فقط على الأجسام المتحركة – تتجاهل أنظمة ACC الكائنات الثابتة عند تحديد الأهداف.
على الطريق

تستخدم معظم السيارات المزودة بنظام ACC واجهة سائق مماثلة. يتم عرض سرعة الرحلة المحددة بواسطة مقطع مضاء أو مؤشر LED على عداد السرعة. يتم عرض تباعد الفجوة المحدد بشكل تخطيطي على مصفوفة نقطية أو شاشة TFT – على سبيل المثال ، من خلال التباعد بين سيارتين تخطيطيتين. عندما يتعقب ACC سيارة ، يضيء رمز آخر على شاشة لوحة العدادات. وبهذه الطريقة ، يمكن رؤية سرعات السيارة المطلوبة والفعلية ، والفجوة المطلوبة ، وإجراءات التتبع الخاصة بلوحة التحكم ACC بسرعة وسهولة.
أنظمة ACC الحالية مناسبة للاستخدام بشكل أساسي على الطرق السريعة والطرق الريفية المفتوحة. لن يقوموا بفرملة السيارة حتى حالة التوقف التام ، حتى لو كانت السيارة موجهة مباشرة نحو عائق على جانب الطريق. علاوة على ذلك ، إذا توقفت حركة المرور أمامك ، فقد يصدر صوت إنذار ولكن مرة أخرى لن يتم فرملة الطوارئ في السيارة. أنظمة تجنب الاصطدام هذه في طور الإعداد ولكن كما لوحظ في بداية هذه القصة ، فإن ACC هو الخطوة الأولى فقط على هذا الطريق. ومع ذلك ، فهي خطوة رائعة جدًا …



